
Animation multirésolution d'objets déformables en temps-réel. Application à la simulation chirurgicale
L'animation de scènes virtuelles en synthèse d'images est une technique maîtrisée, largement utilisée pour les effets spéciaux cinématographiques et les jeux vidéos. Elle se limite toutefois la plupart du temps à l'animation manuelle d'objets rigides. Cette thèse se propose de ch...
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
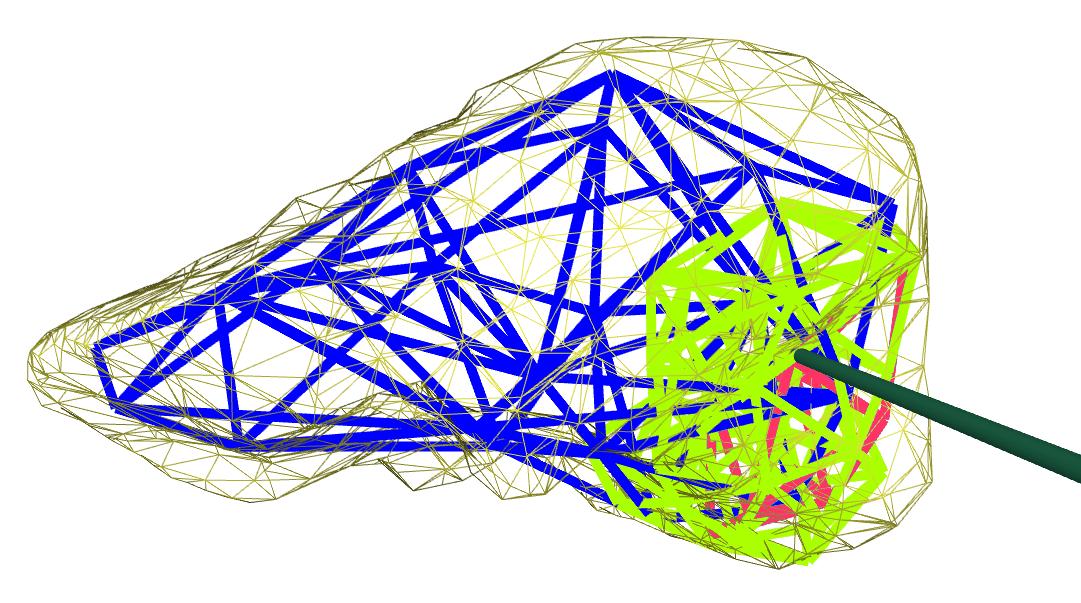
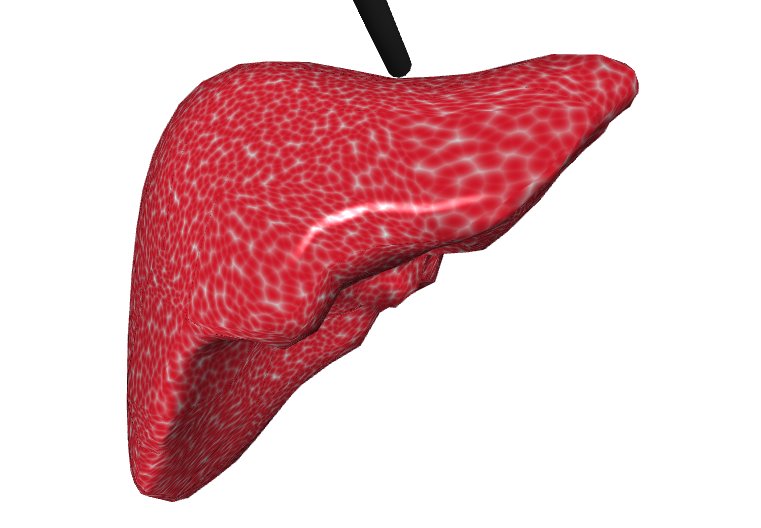
| Summary: | L'animation de scènes virtuelles en synthèse d'images est une technique maîtrisée, largement utilisée pour les effets spéciaux cinématographiques et les jeux vidéos. Elle se limite toutefois la plupart du temps à l'animation manuelle d'objets rigides. Cette thèse se propose de chercher à générer automatiquement les déformations d'un objet mou, qui plus est en temps-réel. L'application visée est la création d'un simulateur chirurgical d'opérations minimalement invasives destiné à terme à la formation des chirurgiens. Les méthodes actuelles ne permettent pas d'obtenir à la fois un réalisme visuel satisfaisant et une animation en temps-réel. Pour y parvenir nous avons utilisé les lois de l'élasticité linéaire qui garantissent le réalisme de l'animation et assurent qu'un même comportement de l'objet sera approché, quelle que soit la finesse de la discrétisation. Nous proposons alors une méthode de simulation multirésolution, qui adapte automatiquement en fonction de la simulation, pour chaque zone de l'objet, la précision des calculs pour obtenir un compromis entre une simulation grossière et très rapide ou au contraire une animation plus précise utilisant davantage de points. La partie de l'organe proche de l'outil manipulé par l'utilisateur sera ainsi animée avec une grande précision, qui diminuera dans les régions lointaines, moins importantes visuellement. Ces travaux ont abouti à la réalisation d'un prototype de simulateur chirurgical offrant une animation en temps-réel grâce à l'utilisation de la multirésolution. Le réalisme est accru par l'utilisation d'un dispositif à retour d'effort simulant la résistance de l'organe à la déformation, calculée grâce au modèle physique interne. |
|---|